Realizar un solapamiento cráneo-cara de forma manual
Comprensión de los parámetros de la cámara
La superposición craneofacial consiste en superponer un modelo 3D de un cráneo post-mortem (PM) contra una fotografía ante-mortem (AM) para verificar si pertenecen o no a la misma persona.
Esta superposición es realizada por un experto forense ajustando posición, orientación y tamaño del cráneo sobre AM. Esto conduce a la falsa idea de que para realizar una superposición solamente es necesario emplear operaciones de traslación, rotación y escalado sobre el modelo 3D del cráneo. Estas operaciones pueden ser realizadas con programas de edición de imágenes como Adobe Photoshop. Sin embargo, analizando el proceso de superposición con más profundidad se revela que el aspecto de un rostro en una fotografía viene también determinado por la forma en la que ésta fue adquirida. Por tanto, no es solo necesario conocer la ubicación y orientación de la cámara sino también sus parámetros intrínsecos, tales como modelo de cámara empleado o el objetivo y configuración utilizados para tomar la fotografía.
En resumen, al realizar una superposición, el experto forense tiene que realizar una fotografía del cráneo bajo las mismas condiciones en las que la fotografía fue adquirida. Por consiguiente, es esencial entender qué factores están involucrados en la adquisición de una fotografía y su efecto sobre la apariencia del cráneo. Estos factores se denominan parámetros de la cámara.
El modelo de cámara pinhole
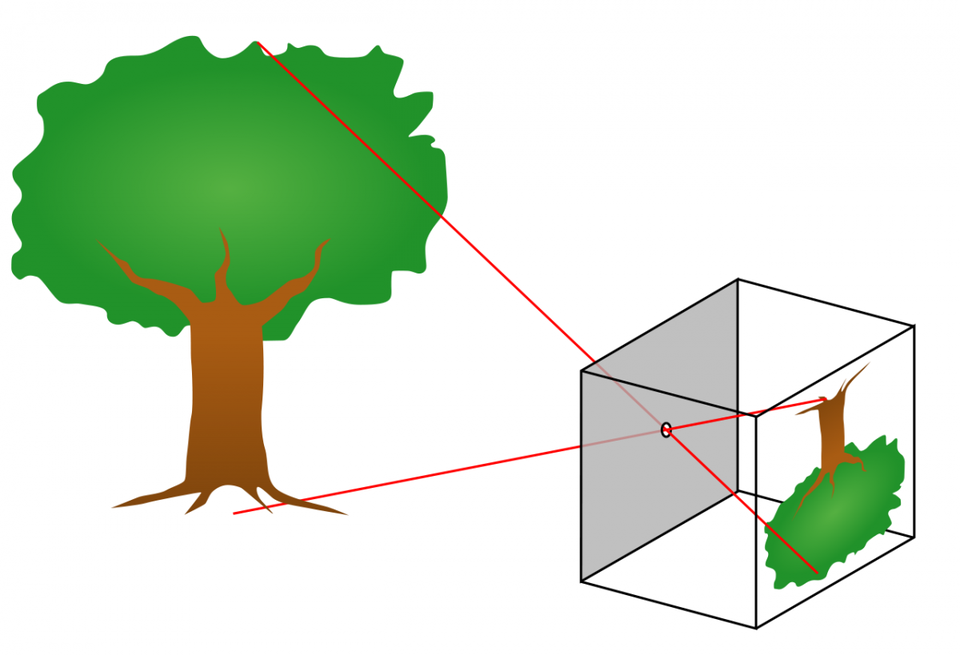 Figura 1. Ejemplo de cámara pinhole, también conocida como cámara estenopeica. Éste es uno de los primeros tipos de cámara y pese a no contar con lentes ópticas proporciona un modelo matemático aplicable a todas las cámaras modernas.
Figura 1. Ejemplo de cámara pinhole, también conocida como cámara estenopeica. Éste es uno de los primeros tipos de cámara y pese a no contar con lentes ópticas proporciona un modelo matemático aplicable a todas las cámaras modernas.
En una cámara pinhole, también conocidas como cámaras estenopeicas, la imagen de un objeto se forma a partir de los rayos de luz, provenientes del objeto, que entran en la cámara a través de una pequeña abertura. En las cámaras modernas, incluidas las cámaras digitales, esta abertura es sustituida por objetivos. Sin embargo, todas las cámaras se comportan esencialmente como cámaras pinhole. De hecho, el modelo matemático detrás de cualquier cámara es conocido como modelo de cámara pinhole. Este modelo describe cómo se proyecta un punto del espacio 3D en el plano 2D de la fotografía. En otras palabras, el modelo de cámara proporciona una fórmula matemática que dadas las coordenadas de un punto del espacio 3D, respecto a la cámara, permite calcular las coordenadas en las que se proyectaría dicho punto en una fotografía. Aunque la mayoría de las cámaras reales no siguen exactamente el modelo de cámara pinhole, el modelo es lo suficientemente preciso para su aplicación en superposición craneofacial.
El modelo de cámara pinhole modela todos los factores o parámetros involucrados en el proceso de adquisición de una fotografía. Antes de seguir profundizando en los parámetros de la cámara consideremos el siguiente ejemplo en la Figura 2. En el lado derecho de la figura se muestra una escena “desde fuera” donde la cámara está representada por un cubo naranja. La cámara está mirando hacia una estatua detrás de la cual se encuentra una esfera de color rojo y un pilar que tiene un color diferente en cada cara. Mientras tanto, en el lado izquierdo de la figura se muestra la fotografía que adquiriría la cámara en dicha escena.
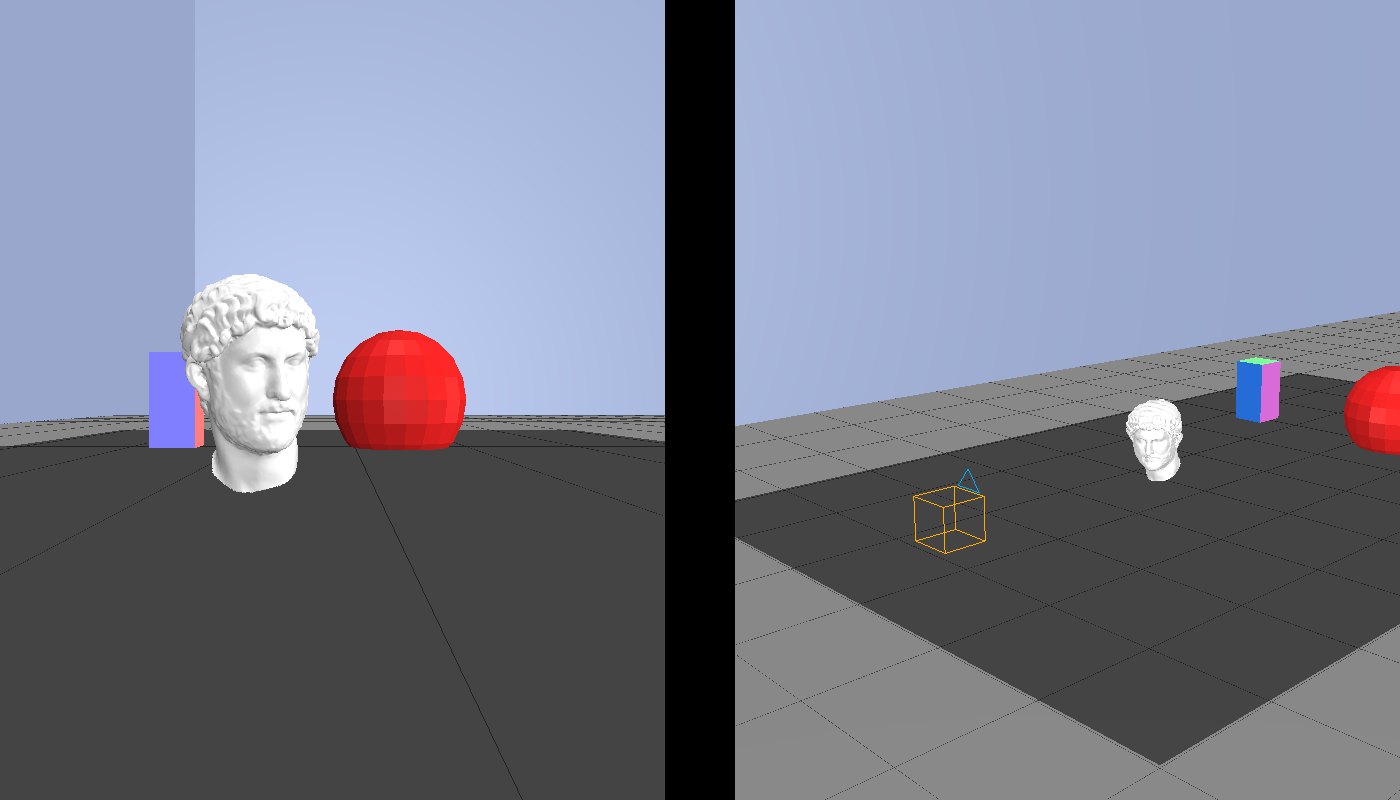 Figura 2. A la derecha, la escena de ejemplo fotografiada por una cámara (cuadro naranja). A la izquierda, la foto tomada por la cámara.
Figura 2. A la derecha, la escena de ejemplo fotografiada por una cámara (cuadro naranja). A la izquierda, la foto tomada por la cámara.
Con este escenario en mente, ahora pasaremos a enumerar todos los parámetros de la cámara y a analizar su efecto sobre la fotografía.
-
Posición de la cámara. Es la ubicación de la cámara, representada por un punto en el espacio 3D.
-
Orientación de la cámara. Es la dirección en la que está orientada la cámara, representada a través de tres ángulos.
Figura 3.1. Efecto de una rotación a lo largo de un eje.
Figura 3.2. Efecto de una rotación a lo largo de un eje.
Figura 3.3. Efecto de una rotación a lo largo de un eje.
Figura 3.4. Efecto de una rotación a lo largo de un eje.
- Distancia focal. Es la distancia focal del objetivo de la cámara. La distancia focal determina el ángulo de visión de la fotografía, o en términos generales, el zoom óptico. La mayoría de focales se encuentra entre los 18 mm y los 300 mm. Una distancia focal pequeña conlleva un ángulo de visión amplio, mientras que un valor elevado conlleva un ángulo de visión más reducido. La Figura 4 muestra cuatro fotos de una misma escena tomadas con diferentes distancias focales (35 mm, 70 mm, 100 mm y 150 mm). En estas imágenes se observa que el tamaño del objeto en la fotografía aumenta según lo hace la distancia focal pese a que la cámara se mantenga todo el tiempo en el mismo lugar. El rango de distancias focales disponible en una cámara depende del objetivo específico instalado. Por suerte, el valor de la distancia focal utilizado para adquirir una fotografía a menudo se encuentra almacenado en los metadatos de dicha fotografía.
Figura 4.1. Fotografía de la escena tomada con una distancia focal de 35 mm.
Figura 4.2. Fotografía de la escena tomada con una distancia focal de 70 mm.
Figura 4.3. Fotografía de la escena tomada con una distancia focal de 100 mm.
Figura 4.4. Fotografía de la escena tomada con una distancia focal de 150 mm.
-
Tamaño del sensor. Es el ancho de la película fotográfica o del sensor digital en el que se captura la imagen. Tiene un efecto similar pero opuesto a la distancia focal, es decir, reducir el tamaño del sensor a la mitad es equivalente a duplicar el valor de la distancia focal. La mayoría de las cámaras profesionales utilizan un sensor de 35 mm de ancho.
-
Distancia de la cámara a la persona. Es la distancia real entre la cámara y el objeto o persona fotografiado. Cuanto más pequeña es la distancia entre la cámara y la persona/objeto, mayor será el tamaño aparente de dicha persona en la fotografía. Sin embargo, a diferencia de lo que pasa con la distancia focal, según se reduce esta distancia, mayor serán las distorsiones de perspectiva que afecten a la persona/objeto fotografiado. Por ejemplo, este efecto es el que ocurre cuando al tomarnos una fotografía desde muy cerca, nuestra nariz aparece anormalmente grande con respecto al resto de la cabeza. Además, si se observa con atención también se puede ver que las partes de la cara más alejadas de la cámara, como pueden ser el cabello o las orejas, aparecen más pequeñas del resto de la cabeza. La Figura 5 muestra la comparación de dos fotografías con un tamaño aparente del rostro similar. La primera es una fotografía adquirida desde cerca de la cara, es decir, la distancia entre la cámara y el sujeto es pequeña. Mientras que la segunda se ha adquirido desde lejos, pero usando una distancia focal más grande. Se puede ver que la primera fotografía tiene distorsiones de perspectiva significativas mientras que la segunda no.
Figura 5.1. Comparación entre un primer plano y uno tomado a gran distancia focal.
Figura 5.2. Comparación entre un primer plano y uno tomado a gran distancia focal.
- Punto principal. Es el desplazamiento del punto principal de la fotografía. Las distorsiones de perspectiva asociadas a este parámetro se pueden apreciar principalmente en fotografías con un ángulo de visión alto (es decir, con una distancia focal pequeña) que han sido recortadas. Véase por ejemplo la siguiente imagen. En ella se puede apreciar que la persona fotografiada parece estar “estirada” horizontalmente a causa de las distorsiones de perspectiva. Si se observan con atención las líneas del suelo, se puede apreciar con facilidad que las líneas paralelas convergen hacia el centro de la foto.
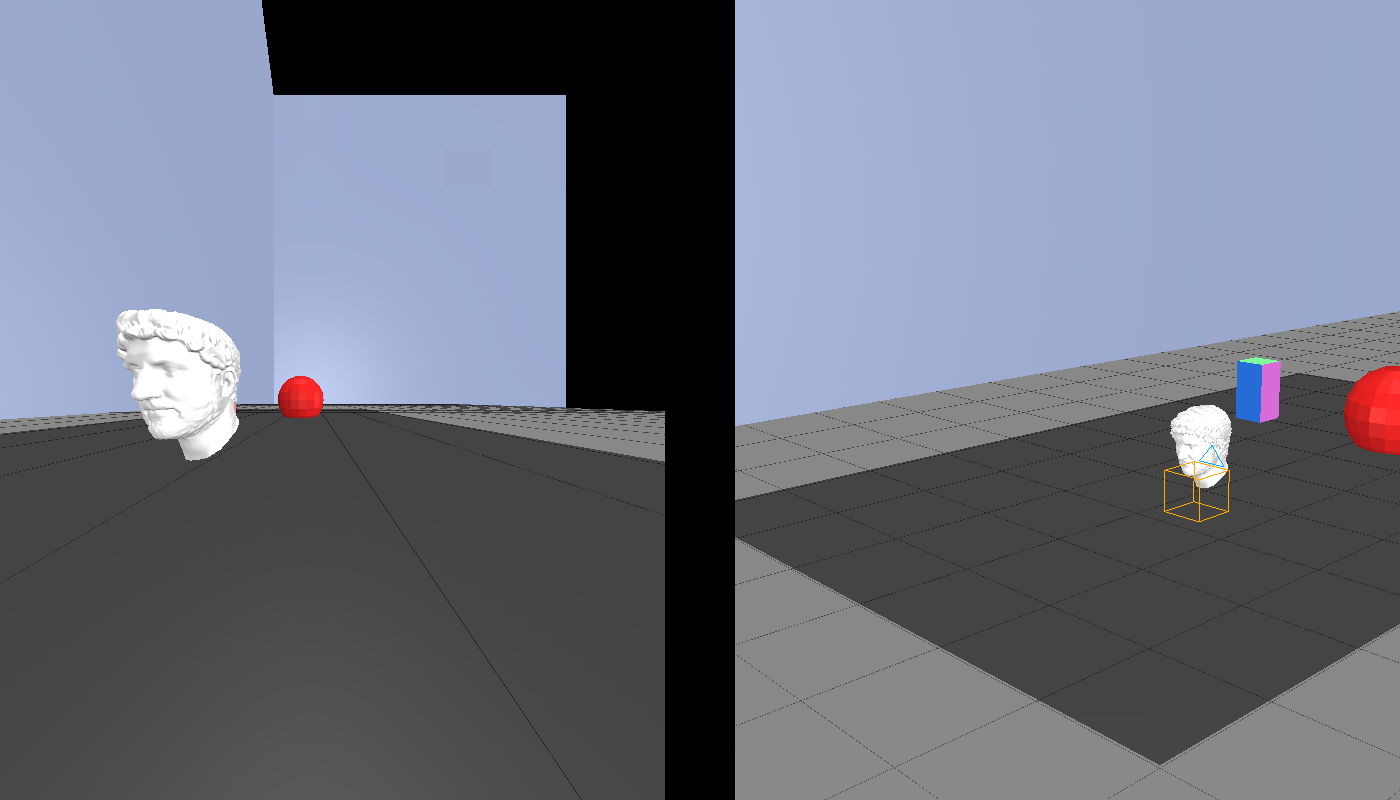 Figura 6.1. Una fotografía completa. Las líneas en el suelo convergen hacia el centro de la imagen.
Figura 6.1. Una fotografía completa. Las líneas en el suelo convergen hacia el centro de la imagen.
Ahora vamos a pasar al siguiente ejemplo. En la imagen se puede ver que las líneas del suelo parecen converger, pero no hacía el centro de la imagen, sino hacía un punto que se encuentra fuera de ella. Esto es una señal de que la fotografía ha sido recortada. De hecho, la imagen original era considerablemente más ancha y las líneas del suelo convergían hacia el centro de la misma.
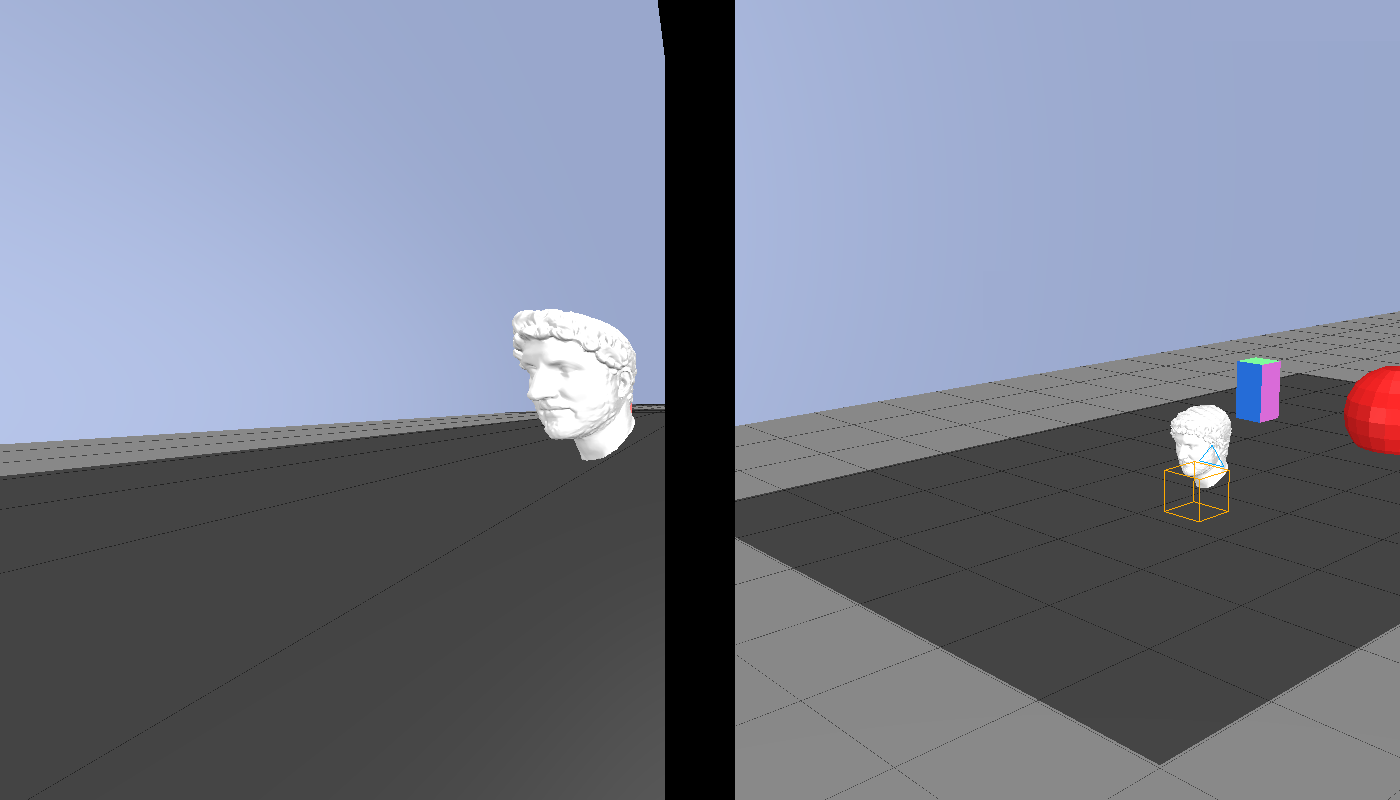 Figura 6.2. Una fotografía recortada. Las líneas en el suelo convergen fuera la imagen.
Figura 6.2. Una fotografía recortada. Las líneas en el suelo convergen fuera la imagen.
En resumen, el punto principal es el punto hacia donde convergen las líneas y normalmente se encuentra en el centro de la fotografía. Desplazando el punto principal se pueden reproducir las distorsiones de perspectiva de la imagen original, pese a que estemos trabajando con un recorte debido a que la imagen original no esté disponible. El punto principal se puede desplazar tanto en el eje horizontal como vertical. En Skeleton·ID se utiliza la siguiente nomenclatura. Un valor de (0, 0) representa que el punto principal se encuentra en el centro de la imagen. Un valor de -1 en algunos de los ejes representa que el punto principal se encuentra en el punto más a la izquierda/arriba de la imagen, dependiendo del eje. Mientras que un valor de 1 representa que el punto principal se encuentra en el punto más a la derecha/abajo, dependiendo del eje. Salvo en recortes, el punto principal no suele cambiar, cuando se realizan operaciones de paralaje (parallax en inglés), las cuales se describen en la siguiente sección.
Operaciones avanzadas de la cámara
Esta sección incluye dos operaciones complejas que modifican de forma simultánea dos parámetros de la cámara.
- Cambiar de perspectiva. Esta operación combina una reducción de la distancia focal con una reducción de la distancia entre el objeto y la cámara. La primera operación hace que el objeto sea más pequeño, mientras que la segunda lo hace más grande. El efecto general es que el tamaño aparente del objeto no cambia, pero si incrementa o reduce las distorsiones de perspectiva presentes en el objeto. Por tanto, esta operación permite modificar las distorsiones de perspectiva sin cambiar el tamaño aparente del objeto.
Figura 7.1. Cambiar de perspectiva.
Figura 7.2. Cambiar de perspectiva.
Figura 7.3. Cambiar de perspectiva.
Figura 7.4. Cambiar de perspectiva.
- Cambiar paralaje (parallax). Esta operación combina un desplazamiento del punto principal con una traslación de la cámara. El resultado es que cambia el punto principal de la imagen sin cambiar la posición aparente del objeto.
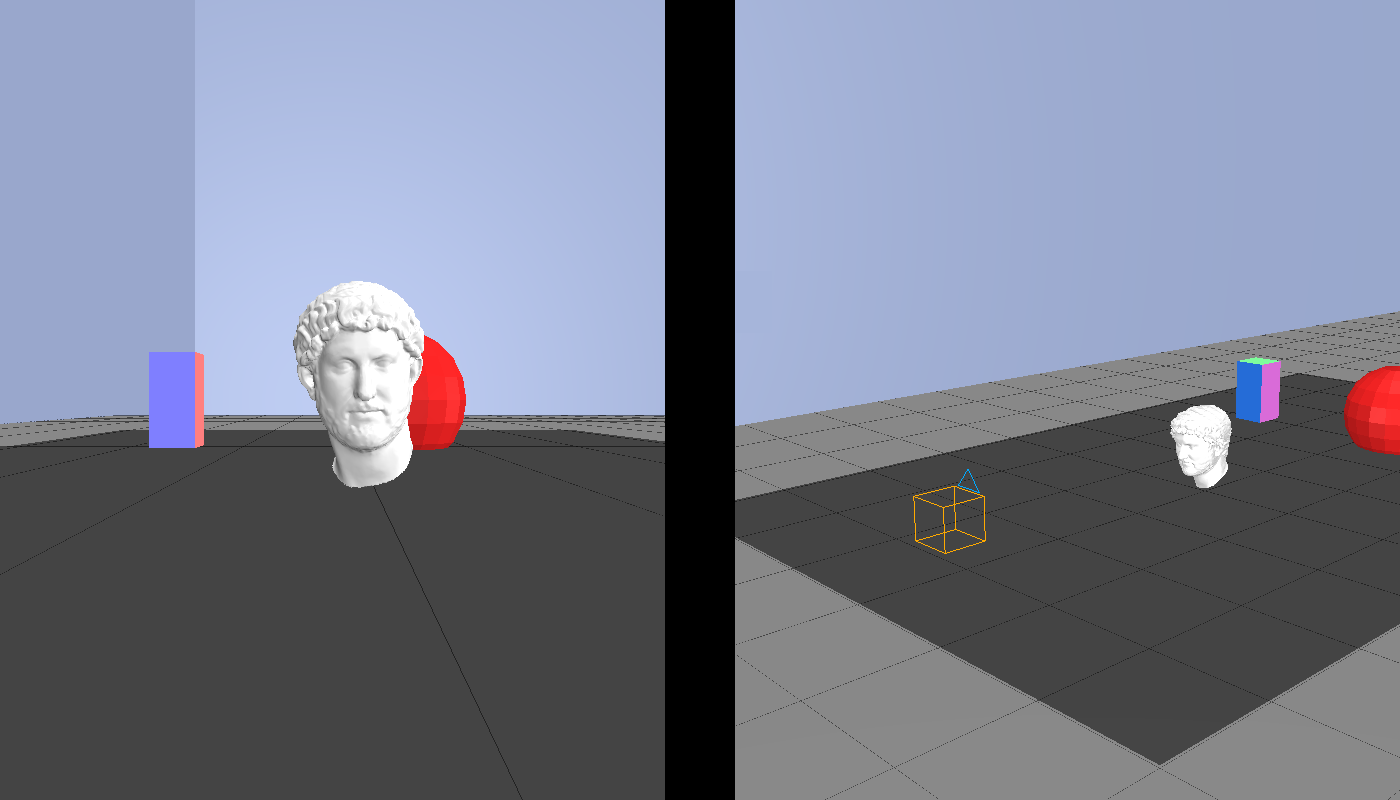 Figura 8.1. El sujeto aparece en el centro de la fotografía.
Figura 8.1. El sujeto aparece en el centro de la fotografía.
Al cambiar el punto principal de la imagen, el objeto se “estira” pero también se desplaza de su posición original.
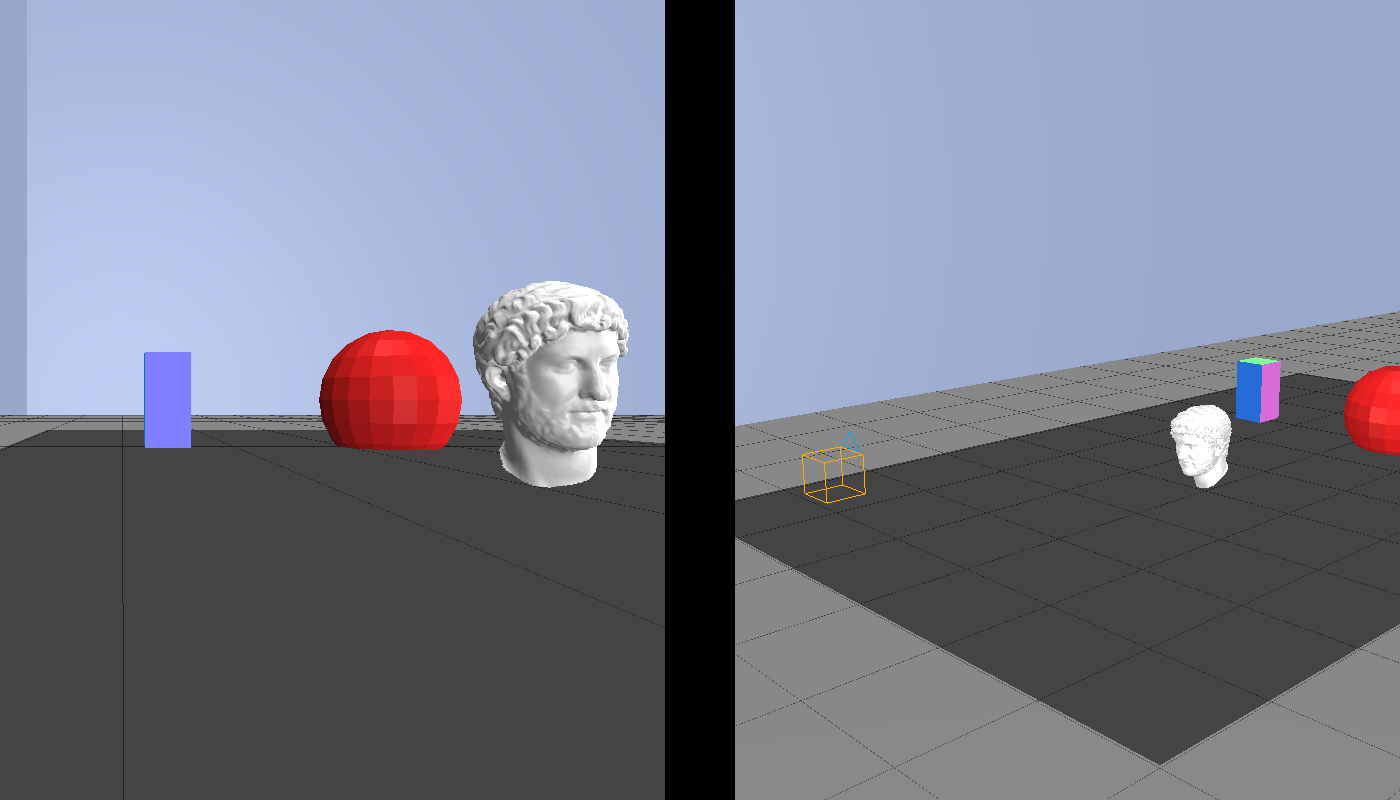 Figura 8.2. Tras desplazar el punto principal, el sujeto se ha movido del centro.
Figura 8.2. Tras desplazar el punto principal, el sujeto se ha movido del centro.
Este desplazamiento se puede compensar con un movimiento de la cámara para mantener el objeto en la misma posición aparente.
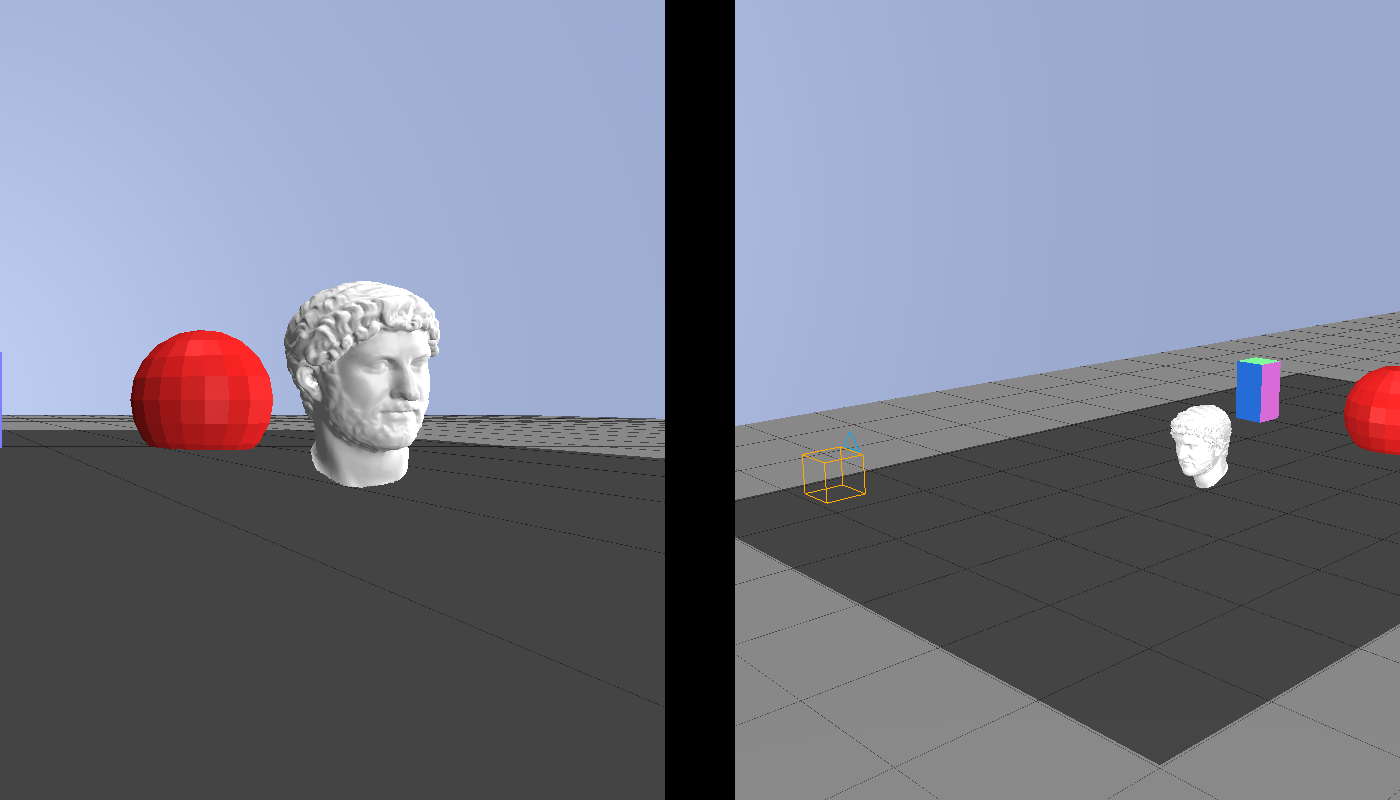 Figura 8.3. Al mover la camera, el sujeto vuelve a aparecer en el centro de la fotografia.
Figura 8.3. Al mover la camera, el sujeto vuelve a aparecer en el centro de la fotografia.
Operaciones de cámara básicas en Skeleton·ID
Para replicar la pose exacta de la cara del sujeto en la fotografía con el modelo 3D del cráneo podremos hacerlo de manera manual mediante las operaciones de cámara básicas: rotación, traslación y distancia cámara-sujeto.
-
La rotación del cráneo, la llevaremos a cabo situando el ratón sobre el mismo y manteniendo presionado el botón izquierdo del ratón mientras lo arrastramos.
-
Para mover / trasladar el cráneo, situaremos el ratón sobre el mismo y mantendremos presionada la rueda del ratón mientras lo arrastramos.
-
Para ampliar / reducir la distancia entre la cámara y el cráneo (se observa una reducción / aumento del tamaño aparente del cráneo) basta con situar el ratón sobre cualquier punto del cráneo y usar la rueda del ratón hacia nosotros (para aumentar la distancia), o hacia fuera, para reducirla.
| CONTROLES | ACCIONES |
|---|---|
| Botón izquierdo del ratón presionado + arrastrar | Rotación del cráneo |
| Rueda del ratón presionada + arrastrar | Traslación del cráneo |
| Rueda del ratón hacia dentro o hacia afuera | Distancia cámara-sujeto |
Si lo preferimos, podemos mostrar y activar un widget de roto-traslación (y ejes de traslación) análogo al de la escena 3D presionando en el botón  .
.
 Figura 9. Escena de solapamiento cráneo-cara mostrando la realización de un solapamiento manual con el widget de roto-traslación activado.
Figura 9. Escena de solapamiento cráneo-cara mostrando la realización de un solapamiento manual con el widget de roto-traslación activado.
En cualquier momento, durante el proceso de solapamiento podemos reinicializar la posición del cráneo mediante el botón  de manera que reinicializaremos los parámetros de la cámara y el cráneo se mostrará en el centro de la imagen.
de manera que reinicializaremos los parámetros de la cámara y el cráneo se mostrará en el centro de la imagen.
Además, podemos ajustar la sensibilidad de los controles de la cámara mediante el slide “sensibilidad”, situado en los efectos de cámara (Figura 10). Puede modificarse seleccionando el círculo y desplazándolo (mantener presionado botón izquierdo del ratón) a la izquierda para una mayor sensibilidad (movimientos más lentos/precisos) o la derecha para una menor sensibilidad (movimientos más rápidos).
 Figura 10. Efectos de cámara. Slide para modificar la sensibilidad de los controles de la cámara.
Figura 10. Efectos de cámara. Slide para modificar la sensibilidad de los controles de la cámara.
Operaciones de cámara avanzadas en Skeleton·ID
Las operaciones de cámara avanzadas incluyen el movimiento del punto principal, cambio de focal y tamaño del sensor. La manera de modificar estos tres parámetros es a través de sus correspondientes formularios, ya sea metiendo un valor numérico concreto, o utilizando las flechas para aumentar/disminuir el valor actual.
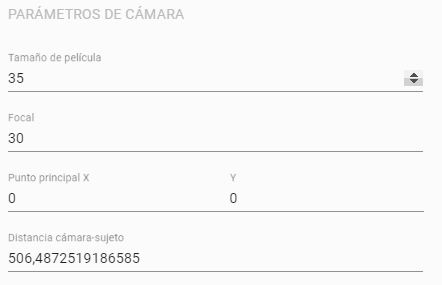 Figura 11. Parámetros de cámara avanzada.
Figura 11. Parámetros de cámara avanzada.
A continuación, se describe brevemente el cometido de estos tres parámetros (ver Sección Comprensión de los parámetros de la cámara):
-
Punto principal: en general se asume que el punto principal de una fotografía se encuentra en el centro de la fotografía. Sin embargo, si esta se ha recortado, el punto principal se habrá desplazado y, por lo tanto, habrá que estimarlo para poder modelar correctamente las deformaciones de perspectiva.
-
Focal: es la distancia focal del objetivo de la cámara. La distancia focal determina el ángulo de visión de la fotografía, o en términos generales, el zoom óptico. La mayoría de focales se encuentra entre los 18mm y los 300mm. Una distancia focal pequeña conlleva un ángulo de visión amplio, mientras que un valor elevado conlleva un ángulo de visión más reducido.
-
Tamaño del sensor: es el ancho de la película fotográfica o del sensor digital en el que se captura la imagen. La mayoría de las cámaras profesionales utilizan un sensor de 35 mm de ancho.
Operaciones de cámara complejas en Skeleton·ID
Las operaciones de cámara complejas incluyen la perspectiva y el parallax (Figura 12). Estas dos operaciones son en realidad una combinación de cambio de varios parámetros de la cámara a la vez.
 Figura 12. Operaciones de cámara compleja.
Figura 12. Operaciones de cámara compleja.
-
La operación de perspectiva combina una reducción de la distancia focal con una reducción de la distancia entre el objeto y la cámara. La primera operación hace que el objeto sea más pequeño, mientras que la segunda lo hace más grande. El efecto general es que el tamaño aparente del objeto no cambia, pero si incrementa o reduce las distorsiones de perspectiva presentes en el objeto. Por tanto, esta operación permite modificar las distorsiones de perspectiva sin cambiar el tamaño aparente del objeto.
-
La operación de parallax, combina un desplazamiento del punto principal con una traslación de la cámara. El resultado es que cambia el punto principal de la imagen sin cambiar la posición aparente del objeto.